Exercise Foundation: Sensor Hierarchy#
Hypothetical#
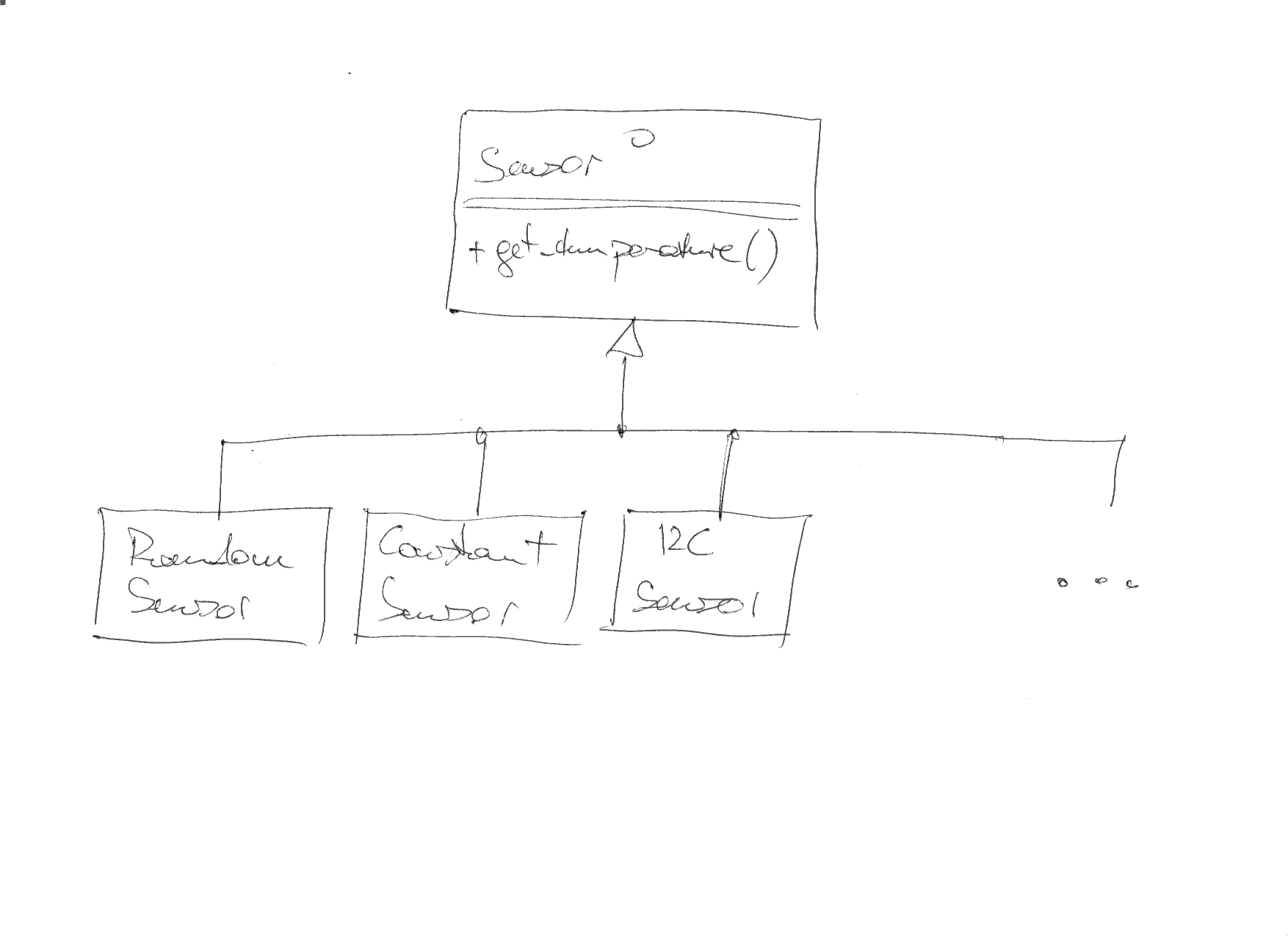
We are an organization that sits on a large pile of software. Sensors, temperature sensors actually, are fundamental in that pile, and there are many sensor implementations around. All are organized in a class hierarchy, starting at an abstract base class (an interface):
#pragma once
class Sensor
{
public:
virtual ~Sensor() {}
// returns degrees Celsius
virtual double get_temperature() = 0;
};
Two concrete implementations of such sensors that we will use in the exercise series in this course are:
RandomSensor. That sensor yields floating point random numbers in a configurable range.ConstantSensor. That one yield always the same temperature. Cool for testing.
We will extend that hierarchy along with the exercises.
Class Hierarchy#