Building A Cross Toolchain For The Raspberry Pi, Using crosstool-ng#
Why This Article? Why Not Use A Prebuilt Toolchain?#
There used to be a toolchain for the Raspberry Pi, made by the Raspberry Pi OS creators. Sadly, this repository has been dead since years.
One popular toolchain, Linaro, is widely recommended for the Raspberry. It does not work for C++ though - its
libstdc++has an unsatisfied version dependency onlibpthread.A number of other Raspberry toolchains exist out there, but I either didn’t get them to work at all (see the
glibcversion dependency), or didn’t get them to work for C++.
Prebuilt toolchains may work for C, but I failed to find one that works for C++. The amount of work that I invested in finding one was, in my opinion, totally wasted. Building a toolchain yourself is not at all hard, provided that you bring basic Linux understanding (which you should if you program for it).
In my opinion (please given me feedback), this article describes the most close-to-correct way to build a toolchain for a target that does not come with a toolchain. Although I describe the situation for the Raspberry (because that was my primary intention), it will sure work for any target.
Installing crosstool-ng#
Below is a writeup of how I installed crosstool-ng (running
Fedora, I chose to install from a released tarball) . Please read
through their installation documentation for your particular
situation.
Prerequisites#
crosstool-ng requires one to install a number of packages
first. Thankfully, they do thorough testing in Docker, and the list of
dependencies can be taken from the Docker file for your OS (see here).
root@host # dnf install autoconf gperf bison file flex texinfo help2man gcc-c++ libtool make patch \
ncurses-devel python3-devel perl-Thread-Queue bzip2 git wget which xz unzip rsync diffutils \
meson ninja-build
root@host # apt install -y gcc g++ gperf bison flex texinfo help2man make libncurses5-dev \
python3-dev autoconf automake libtool libtool-bin gawk wget bzip2 xz-utils unzip \
patch libstdc++6 rsync git meson ninja-build
Installing From Cloned Git Repository#
Note
At one point, ct-ng (as installed from the release tarball)
failed to build toolchains because it tried to download a version
of zlib that did not exist anymore:
[EXTRA] Retrieving 'zlib-1.2.12'
[ERROR] zlib: download failed
The issue had already been resolved in the upstream repository, but
no tarball release had been made. So building crosstool-ng from
source is in order.
The steps are basically the same as installing from the release tarball, except that some massaging (yes, autotools) in the source directory is necessary prior to building.
Clone repository, and massage source tree:
me@host$ git clone https://github.com/crosstool-ng/crosstool-ng
me@host$ cd crosstool-ng/
me@host$ sh ./bootstrap
me@host$ ./configure --prefix=/home/jfasch/cross
me@host$ make
me@host$ make install
Installing From Release Tarball#
As complained above, releases might be out of date. Anyway, the
procedure is slightly simpler that building from the upstream repo
source. Download latest release here); current version as of
this writing is 1.25.0.
me@host$ wget http://crosstool-ng.org/download/crosstool-ng/crosstool-ng-1.25.0.tar.xz
me@host$ tar xf crosstool-ng-1.25.0.tar.xz
me@host$ cd crosstool-ng-1.25.0/
me@host$ ./configure --prefix=/home/jfasch/cross
me@host$ make
me@host$ make install
PATH, And Basic Test#
Add ct-ng to PATH,
~/.bashrc#me@host$ export PATH=$HOME/cross/bin:$PATH
Test if all is well,
me@host$ ct-ng help
This is crosstool-NG version 1.25.0
Copyright (C) 2008 Yann E. MORIN <yann.morin.1998@free.fr>
This is free software; see the source for copying conditions.
There is NO warranty; not even for MERCHANTABILITY or FITNESS FOR A
PARTICULAR PURPOSE.
...
Configure Toolchain Build#
ct-ng toolchain build configuration works a lot like the Linux
kernel’s configuration system (a little less elaborate though). There
are a number of base configurations to choose from (we need a
Raspberry config), and, having chosen one, you can tune it to your
needs.
Base Configuration For The Raspberry#
me@host$ ct-ng list-samples|grep rpi
[G...] aarch64-rpi3-linux-gnu
[G...] aarch64-rpi4-linux-gnu
[G...] armv7-rpi2-linux-gnueabihf
[G...] armv8-rpi3-linux-gnueabihf
[G...] armv8-rpi4-linux-gnueabihf
Mine is a Pi 4, still running the (still default) 32 bit version, so I
create a .config file for that,
me@host $ ct-ng armv8-rpi4-linux-gnueabihf
me@host $ ls -l .config
-rw-r--r--. 1 jfasch jfasch 23179 Sep 23 08:18 .config
Important: glibc Version#
The Error#
Executables built by your toolchain won’t work if the toolchain links
against a C library whose version is higher than what is present on
the target. Continuing with the above default configuration, and just
saying ct-ng build will likely result in an error
[3].
A minimal int main() { return 0; } program, compiled for the
target, will complain:
me@target $ ./a.out
./a.out: /lib/arm-linux-gnueabihf/libc.so.6: version `GLIBC_2.34' not found (required by ./a.out)
Background is that glibc employs ELF symbol versioning
a lot. Key point is that an executable which links against version,
say, 2.34 (which is the ct-ng default), will require the symbol
GLIBC_2.34 in the C library, and fail to load if the target
glibc version is, say, 2.28 [1]. That version
obviously cannot have GLIBC_2.34, so the executable cannot load.
Find out location of glibc,
me@target $ ldd /usr/bin/ls
...
libc.so.6 => /lib/arm-linux-gnueabihf/libc.so.6 (0xb6e06000)
...
Simply invoke (sic!) the library,
me@target $ /lib/arm-linux-gnueabihf/libc.so.6
GNU C Library (Debian GLIBC 2.28-10+rpt2+rpi1+deb10u1) stable release version 2.28.
...
The Fix#
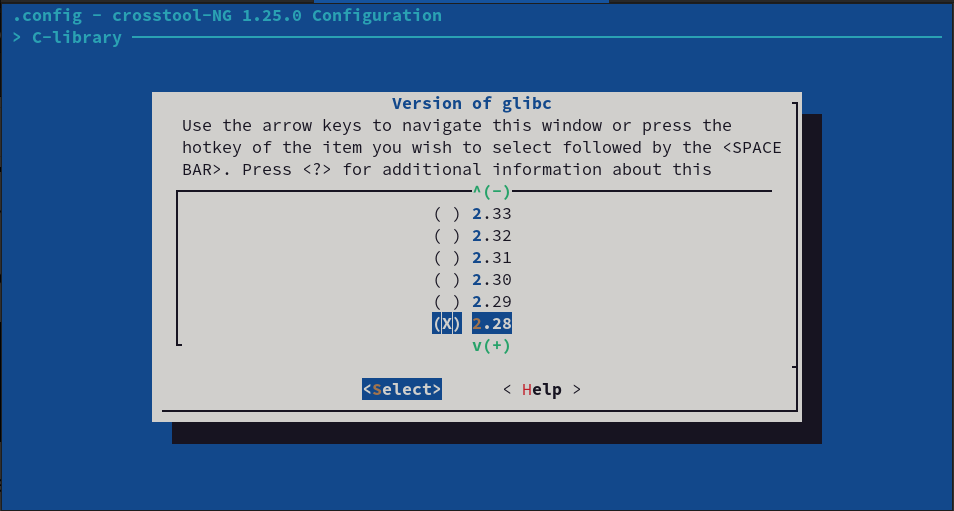
So, it’s 2.28. Back on the host again, tune configuration:
me@host $ ct-ng menuconfig
In C-library -> Version of glibc, choose 2.28.
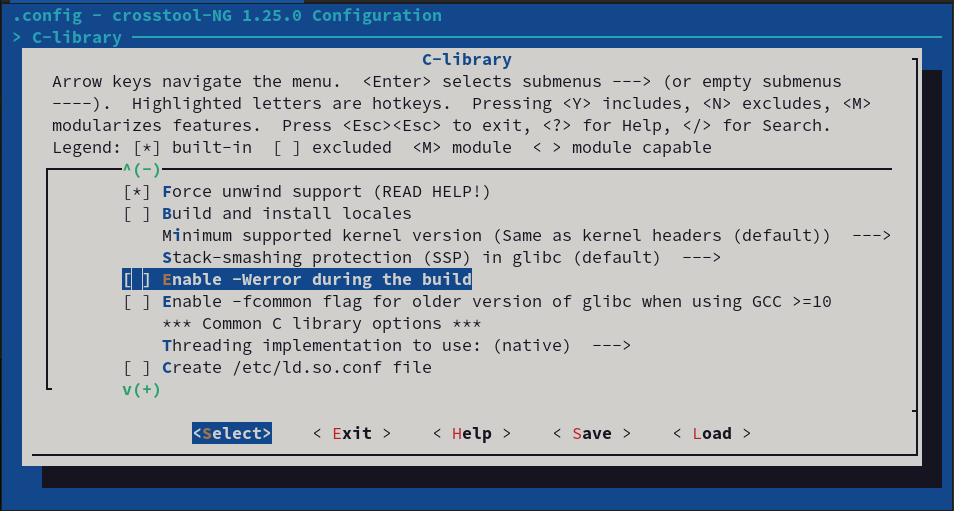
Minor quirk: version 2.28 does not build without warnings, so one
has to disable -Werror during its build,
Important: GCC Version#
Not only is the Pi’s glibc version rather outdated; GCC is also a
bit behind - it’s 8.3.0.
The Error#
Using the latest supported GCC version (12.2.0 as of this writing)
as a cross compiler, A less trivial C++ program fails to start:
./a.out: /lib/arm-linux-gnueabihf/libstdc++.so.6: version `GLIBCXX_3.4.29' not found (required by ./a.out)
./a.out: /lib/arm-linux-gnueabihf/libstdc++.so.6: version `GLIBCXX_3.4.26' not found (required by ./a.out)
It turns out that the program makes use of the std::filesystem
library that has been added in C++17. Apparently that library uses
some more modern functionality from GCC’s C++ support library,
libgcc_s.so.1. That functionality is obviously not contained in
libgcc_s.so.1 as of GCC 8.3.0
The Fix#
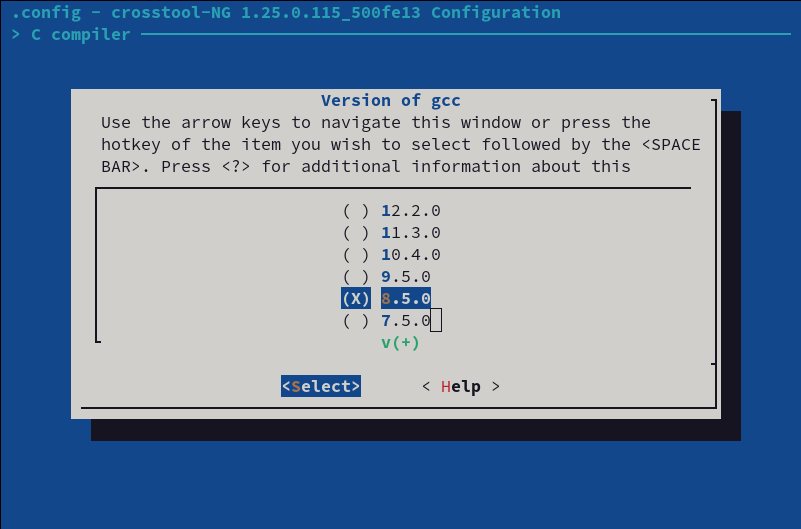
Downgrade the toolchain’s GCC to something like 8.3.0 (8.5.0
is just a minor release, so it should work).
In C compiler -> Version of gcc, choose 8.5.0:
Toolchain Build/Install#
This is as simple as saying,
me@host $ ct-ng build
By default [2], the toolchain is installed in
$HOME/x-tools/armv8-rpi4-linux-gnueabihf/ (you may want to add
$HOME/x-tools/armv8-rpi4-linux-gnueabihf/bin/ to $PATH).
For build system configuration (see for example CMake: Cross Build),
|
|
Sysroot; in CMake toolchain files (see CMake: Cross Build, “Toolchain Files”), this is
|
|
Test#
I tested the toolchain from a number of viewpoints that I describe below.
Simplest: C, <stdio.h>#
Check for availability of libc.
me@host $ ~/x-tools/armv8-rpi4-linux-gnueabihf/bin/armv8-rpi4-linux-gnueabihf-gcc c-stdio.c
me@host $ scp a.out me@target:
me@host $ ssh me@target ./a.out
Hello World
C++, <iostream>#
Check for availability of libstdc++.
#include <iostream>
int main()
{
std::cout << "Hello World" << std::endl;
return 0;
}
me@host $ ~/x-tools/armv8-rpi4-linux-gnueabihf/bin/armv8-rpi4-linux-gnueabihf-g++ c++-iostream.cpp
me@host $ scp a.out me@target:
me@host $ ssh me@target ./a.out
Hello World
C++, <thread>#
Check for availability of libpthread.
#include <thread>
#include <iostream>
int main()
{
std::thread t([](){
std::cout << "Hello Thread" << std::endl;
});
t.join();
std::cout << "Bye" << std::endl;
return 0;
}
me@host $ ~/x-tools/armv8-rpi4-linux-gnueabihf/bin/armv8-rpi4-linux-gnueabihf-g++ -pthread c++-thread.cpp
me@host $ scp a.out me@target:
me@host $ ssh me@target ./a.out
Hello Thread
Bye
Packaging/Distributing The Toolchain#
The toolchain is fully relocatable. Although
$HOME/x-tools/armv8-rpi4-linux-gnueabihf/ contains the cross
toolchain together with the sysroot, even if you
move it around it will remain self-contained.
Pack it into an archive,
$ tar -C ~/x-tools -J -c -f raspberry-pi-toolchain.tar.xz armv8-rpi4-linux-gnueabihf/
And share it with your colleagues.
Afterword#
I hope I could help you with this article. Share it if I could, or, if I couldn’t, feel free to send me an email explaining why.
Either way: cross development is not easy, given the huge number of dependencies between target libraries. This is a rather complex and fragile thing, and there are sure better ways to do cross development than the one that I describe here. Ideally, a target vendor (in our case, the guys who create Raspberry Pi OS) would release an SDK that developers could install, and that contained all that is necessary to do cross development. This would be the toolchain and associated basic runtime libraries (described here), and the entire sysroot of the target.
Creating such an SDK is the job of higher level tools like Yocto or Buildroot - but this is another story.
Footnotes